I – Conceitos Básicos
- Tipos de Juntas
- Ponto de Operação
- Conexões
- Tipos de Cadeias.
II – Transformação de Sistemas Coordenados
- Posição, Translação e Rotação.
- Exemplo: Robô planas 2 juntas.
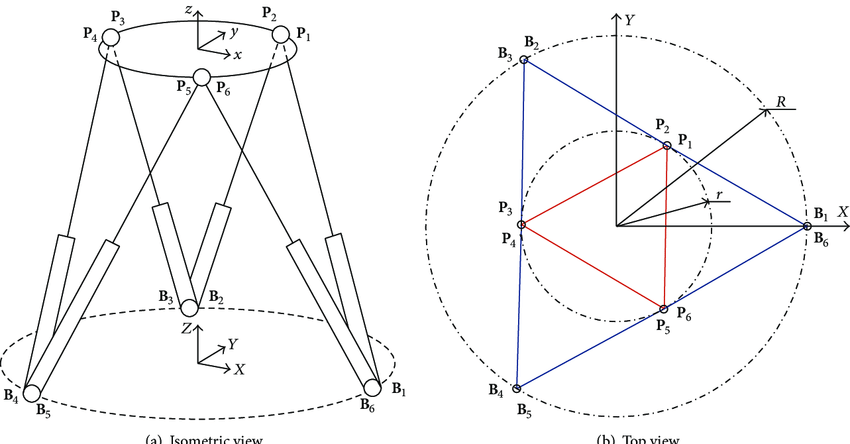
III – Cinemática Direta e Inversa
- Definições
- Estudo de caso modelo Johan
IV – Função de Transferência