
Visão Computacional
Simulação
Eletrônica


Como forma de controle é necessário realizar um cadastro fornecendo algumas informações para registra-lo como inscrito no Processo Seletivo do Capítulo Estudantil IEEE RAS UFCG.
1ª Etapa – Missões Introdutórias
Período: 11 à 16 de Março às 23h59min. | Duração: 6 dias.
Esta etapa consiste em realizar 3 missões introdutórias sobre algumas das áreas que compõe a robótica e automação, são elas: eletrônica, visão computacional e simulação robótica. Dessa forma, foram propostas as seguintes missões:
- Missão Arduino
- Missão OpenCV
- Missão CoppeliaSim
Obs: Caso você não possua um PC ou o que possui não suporta a aplicação proposta nas missões, entre contato via e-mail, Instagram ou com algum dos diretores do capítulo para que possamos disponibilizar horários de acesso a um dos nossos computadores no eRobótica, presencial ou remotamente!
Sobre entregas
Todas as missões/atividades devem ser entregues por meio de um repositório público online no GitHub. O repositório deve conter todas os arquivos solicitados nas missões, incluindo os relatórios. O link do repositório deve ser adicionado na ultima pergunta do formulário no momento da inscrição ou posteriormente editando a resposta no formulário de inscrição.
Os relatórios solicitados são simples, deve conter uma a descrição do que foi realizado e aprendido durante a missão, exibindo os resultados obtidos. Pode ser adicionado nos formatos: PDF ou MD (Markdown).
Instruções:
Eletrônica – Arduino
O Arduino é uma plataforma eletrônica de código aberto (open-source) baseada em hardware e software fáceis de usar. Destina-se a qualquer pessoa que faça projetos interativos. Foi laçada em 2005, na Itália, mas alcançou o resto do mundo rapidamente.
As placas Arduino são capazes de ler entradas (luz em um sensor, dedo em um botão, até mesmo uma mensagem no Twitter) e transformá-la em uma saída (ativando um motor, ligando um LED, ou até mesmo publicando online). Você pode dizer a sua placa o que fazer enviando um conjunto de instruções ao microcontrolador da placa. Para fazer isso você pode usar a linguagem de programação C++ e o Software Arduino, conhecida como IDE Arduino.
O Tinkercad é uma ferramenta online gratuita de criação e design de modelos 3D, permitindo que usuários desenvolvam o seu próprio projeto de forma fácil.
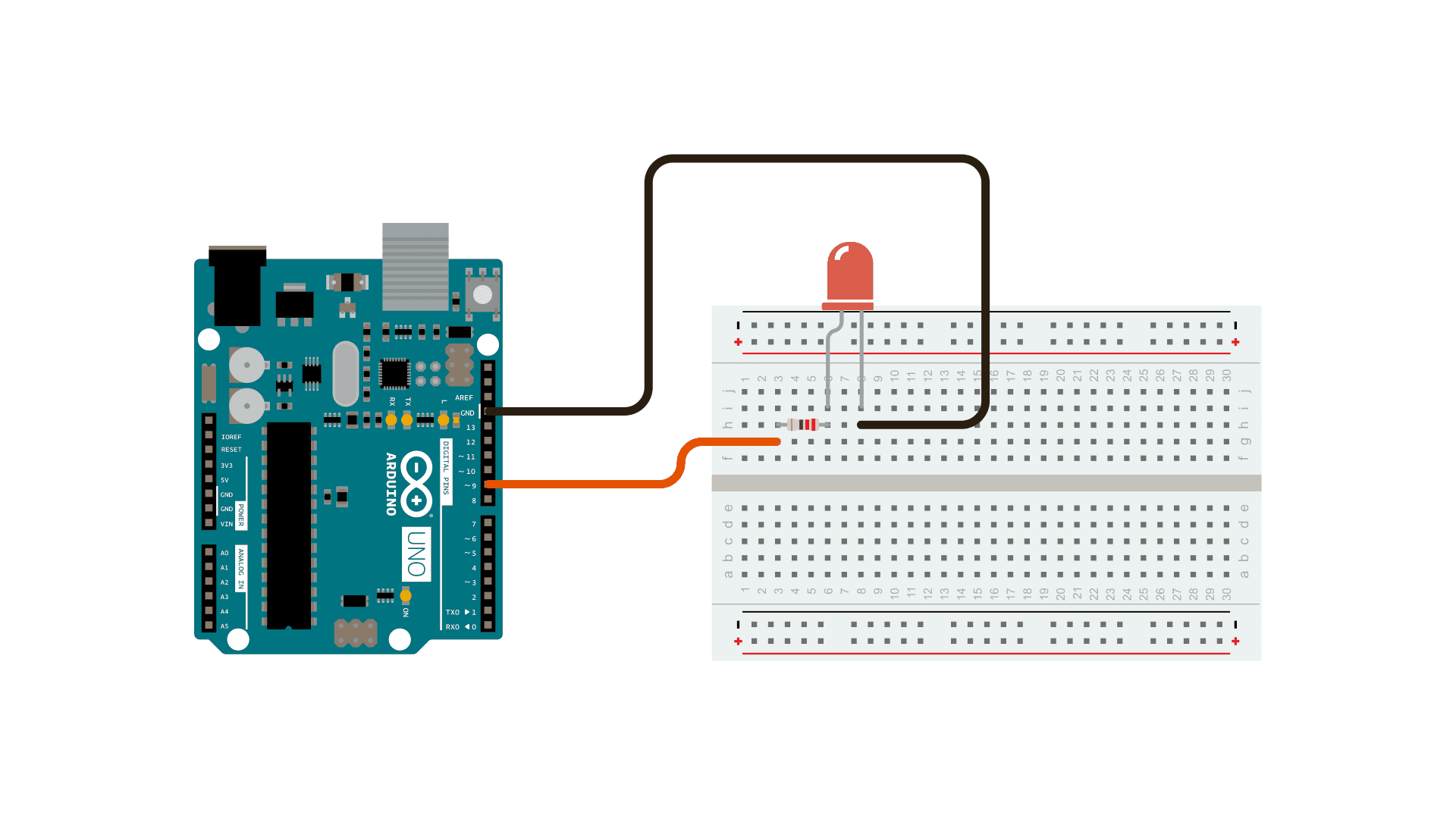
Missão 1.0: Primeiro Circuito Eletrônico – Ascendendo um LED com Arduino
Objetivo: Utilizando a placa de prototipagem Arduino para piscar um LED com diferentes períodos de tempo.
Visão Computacional – OpenCV
A visão computacional procura modelar e replicar a visão humana usando software e hardware. Tentando simular a visão natural, a visão computacional tem embasamento científico decorrente de estudos de algoritmos que buscam analisar e compreender conceitos da visão humana nas áreas de Biologia, Óptica e Matemática (álgebra linear, geometria e estatística).
OpenCV (Open Source Computer Vision) é uma biblioteca de programação, de código aberto e inicialmente desenvolvida pela Intel com o objetivo de tornar a visão computacional mais acessível a desenvolvedores e hobistas. Atualmente possui mais de 500 funções, pode ser utilizada em diversas linguagens de programação (C++, Python, Ruby, Java…) e é usada para diversos tipos de análise em imagens e vídeos, como detecção, tracking e reconhecimento facial, edição de fotos e vídeos, detecção e análise de textos, etc.
Missão 2.0: Conhecendo o OpenCV
Objetivo: Aprender o básico sobre uma biblioteca de visão computacional. Entenda sobre os conceitos básico para trabalhar com imagens e como realizar manipulações de pixel.

Simulação – CoppeliaSim
O CoppeliaSim é um simulador robótico gratuito e uma ótima opção para iniciantes devido a sua interface amigável. Além disso, o CoppeliaSim vem sendo um dos simuladores robóticos mais utilizados no nosso laboratório, juntamente com o Gazebo. Neles fazemos aplicações de robôs e importações de modelos não disponíveis.
Obs: Caso você não tenha um PC ou o que possui não suporta a aplicação, entre contato com algum dos tutores do projeto para usar um dos nossos computadores no eRobótica!
Missão 3.0: Conhecendo o CoppeliaSim
Objetivo: Aprender o básico sobre um simulador robótico. Entenda sobre a interface e seu sistema de hierarquia por meio da visualização de modelos robóticos disponíveis.

2ª Etapa – Escolha um Projeto
Período: 17 à 27 de Março às 23h59min. | Duração: 11 dias.
Nesta etapa vamos iniciar as aplicações específicas dentro das áreas abordadas. Separamos alguns projetos, com atividades semelhante aos projetos do capítulo. Sendo assim você poderá se juntar a um dos nossos projetos, continuando estudando e exercitando como um roboticista utiliza essas áreas no seu dia-a-dia.
Como eu utilizo meu conhecimento de OpenCV em uma aplicação de um projeto?
Como eu uso a ferramenta CoppeliaSim para facilitar e esclarecer minhas aplicações?
Como eu uso o conhecimento de eletrônica para automatizar algo?
Escolha apenas 1 (um) dos projetos disponibilizados abaixo para realizar durante os próximos 11 dias.
Obs: Caso você não possua um PC ou o que possui não suporta a aplicação proposta nas missões, entre contato via e-mail, Instagram ou com algum dos diretores do capítulo para que possamos disponibilizar horários de acesso a um dos nossos computadores no eRobótica, presencial ou remotamente!
Sobre entregas
Todas as missões/atividades devem ser entregues por meio de um repositório público online no GitHub. O repositório deve conter todas os arquivos solicitados nas missões, incluindo os relatórios. O link do repositório deve ser adicionado na ultima pergunta do formulário no momento da inscrição ou posteriormente editando a resposta no formulário de inscrição.
Os relatórios solicitados são simples, deve conter uma a descrição do que foi realizado e aprendido durante a missão, exibindo os resultados obtidos. Pode ser adicionado nos formatos: PDF ou MD (Markdown).
Instruções:
Missão 4.0:Arduino PID Ballance Ball
Objetivo:Construir um projeto de bancada que utiliza pelo menos um sensor e um atuador. Além disso, realizar um sistema de malha fechada com controle PID. Atividade:- Replicar o circuito da bancada no TinkerCAD;
- Calcular distância com sensor ultrassônico;
- Controlar a posição de um servo com Arduino;
- Desenhar o modelo da plataforma em ambiente de modelagem 3D;
- Construir um protótipo da bancada;
- Estudar o que é um Realimentação, Malha fechada e Controle PID;
- Enviar o desenho do AutoCAD, o link do TinkerCAD e uma explicação dos conceitos aprendidos;
- Montar o circuito com componentes reais;
- Implementar o sistema em malha fechada com PID;
- Escrever um breve relatório sobre a missão.
Material de Apoio: Não se limitem apenas aos materiais disponibilizados abaixo.
- Arduino – Uno R3
- 10 Ways to Destroy An Arduino
- Tutorial – Servo Motor Basics with Arduino
- Tutorial – How to Control Servo Motors with Arduino
- Tutorial – Ultrassônico e Arduino
- Vídeo – Using Servo Motors with Arduino
- Vídeo – Servo Motors how do they work?
- Vídeo – What Is PID Control? | Understanding PID Control, Part 1 e 2
- Vídeo – PID Control – A brief introduction
- Extra – Arduino UNO Controlling 20 Servos With 15 bit Precision And Low Jitter
Missão 4.0: I-cybie: Controle de Motores e Sincronização de Movimento
Objetivo: Utilizar a plataforma cachorro-robô I-cybie para controlar o movimento das patas, controlando por bluetooth com um celular.

Atividade:
- Estudar componentes internos do I-cybie;;
- Estudar sobre funcionamento e operação de motor de passo e servo motor;
- Replicar o circuito do I-cybie no TinkerCAD;
- Controlar motor Servo;
- Controlar motor de passo;
- Estudar sobre controle de tempo assíncrono com Arduino(função millis);
- Estudar sobre comunicação bluetooth;
- Realizar programação do microcontrolador para movimentar as patas;
- Implementar a reprodução de movimento;
- Implementar aplicativo para comunicação bluetooth;
- Escrever um breve relatório sobre a missão.
Material de Apoio: Não se limitem apenas aos materiais disponibilizados abaixo.
- Arduino – Uno R3
- 10 Ways to Destroy An Arduino
- Tutorial – Servo Motor Basics with Arduino
- Tutorial – How To Do Multitasking With Arduino
- Tutorial – Multitasking with Arduino – Millis()
- Tutorial – How to Control Servo Motors with Arduino
- Vídeo – Using Servo Motors with Arduino
- Vídeo – Servo Motors how do they work?
- Vídeo – HC-05 Bluetooth Module with Arduino-MIT App Inventor
- Vídeo – First Test Video I-cybie leg hacking for EZ-B brain transplant
- Extra – Arduino UNO Controlling 20 Servos With 15 bit Precision And Low Jitter
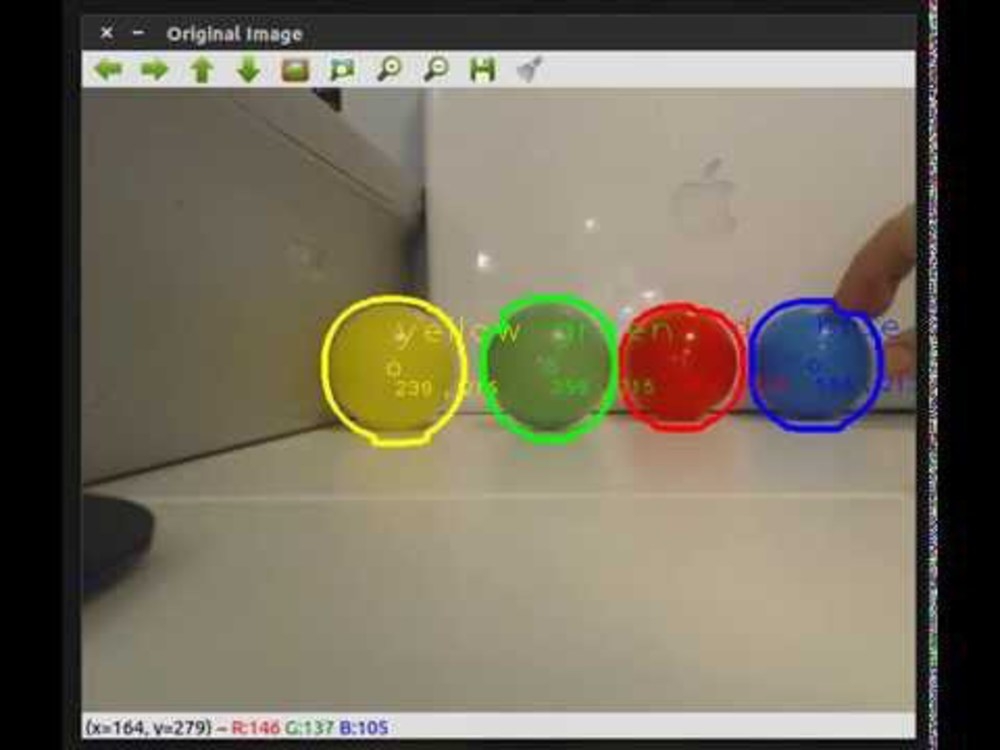
Missão 4.0: Detectar Objetos por Cor
Objetivo:
Criar uma primeira aplicação com OpenCV. O Object Tracking by color é uma aplicação em que objetos são reconhecidos por meio das suas cores. Além disso, deve exibir a uma parte da trajetória do objeto detectado.
Atividade:
- Detectar objetos por cor;
- Desenhar um retângulo nos objetos detectados;
- Criação de uma interface gráfica para criação de máscaras;
- Exibir uma parte da trajetória do objeto.
- Enviar os códigos comentados:
- Explicação do que o código faz;
- Explicação do que cada linha do código faz;
- Escrever um breve relatório sobre a missão.
Material de Apoio: Não se limitem apenas aos materiais disponibilizados abaixo.
Missão 4.0: Hand Tracking
Objetivo:Criar uma aplicação com OpenCV. Realizar o reconhecimento de números utilizando os dedos da mão.

Atividade:
- Enviar o código no formato .py ;
- Escrever um breve relatório sobre a missão.
Material de Apoio: Não se limitem apenas aos materiais disponibilizados abaixo.
Missão 4.0: Controle Cinemático e Rastreio de Trajetória
Objetivo: Criação de cena e uso de sensores em robôs móveis no CoppeliaSim.

Atividade:
- Modelagem Cinemática de um Robô de Tração Diferencial (DDMR);
- Criar um labirinto no CoppeliaSim;
- Utilizar ou criar um DDMR com sensores de distância;
- Criar um script para o robô solucionar o labirinto de forma autônoma;
- Escrever um breve relatório sobre a missão.
Material de Apoio: Não se limitem apenas aos materiais disponibilizados abaixo.
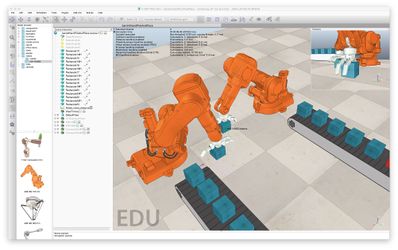
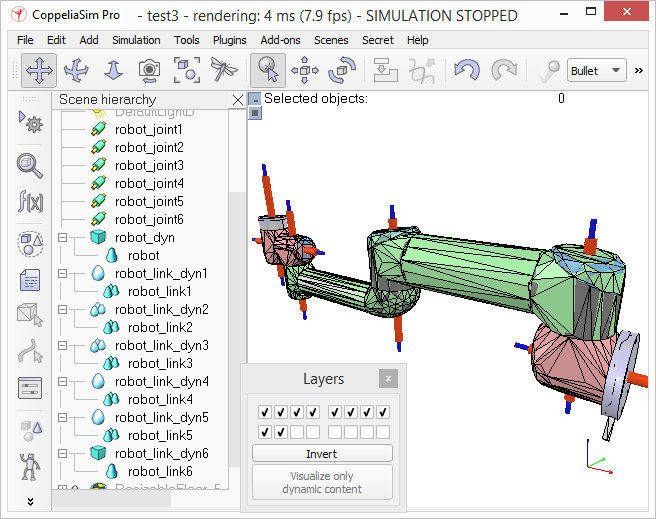
Missão 4.0: Construa o Modelo de um Manipulador Robótico no CoppeliaSim.
Objetivo: Construir o modelo dinâmico do manipulador robótico disponibilizado na plataforma de simulação CoppeliaSim. Além disso, controlar as juntas motorizadas pelo Python.
Atividade:
- Aprender Modelagem de Corpo Dinâmico;
- Aprender sobre divisão de Layers;
- Aprender sobre objetos responsáveis (respondable) e suas propriedades;
- Aprender sobre objetos dinâmicos (dynamic) e suas propriedades;
- Aprender sobre “Dummys” e suas funções;
- Montar o braço robótico com peças fornecidas em formato STL;
- Criar as partes dinâmicas do braço;
- Montar uma árvore estrutural contendo as imagem de referência seguida pelo seu corpo dinâmico;
- Implementar a programação de movimento do braço no CoppeliaSim utilizando python;
- Criar uma cena mostrando o funcionamento do braço em conjunto com a garra;
- Escrever um breve relatório sobre a missão.
Material de Apoio: Não se limitem apenas aos materiais disponibilizados abaixo.