Caminhando lado a lado com a Robótica e a Automação, temos sempre a teoria de Controle, que é muitas vezes temida devido à complexidade que apresenta. Ainda assim, é quase que inviável se aprofundar nas temáticas que esse Capítulo Estudantil visa sem adentrar nos campos que dizem respeito ao Controle de Sistemas. Devido a isso, hoje vamos entender alguns conceitos básicos que o envolvem, como sistemas de malha aberta e de malha fechada.
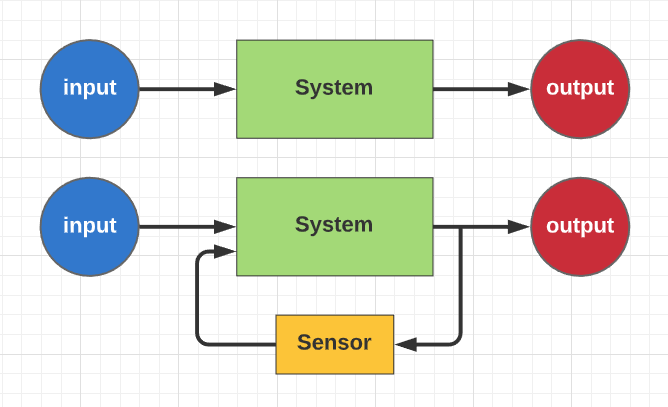
De maneira geral, o Controle de Sistemas busca otimizar um processo de modo que uma saída específica seja alcançada a partir de uma entrada de referência fornecida. Sempre da melhor maneira possível. Dessa forma, a malha que rege esse sistema seria a representação em forma de fluxograma dos dados, desde entrada até a saída. A malha, por sua vez, pode ser uma malha aberta, sem realimentação, ou uma malha fechada, com realimentação.
Trazendo isso para um exemplo prático, utilizaremos a velocidade de um veículo como objeto de estudo. Assim, numa estrada plana, vamos supor que o motorista deve aplicar uma força X no pedal do acelerador (entrada) para manter a velocidade constante em 60 km/h (saída). Por não possuir uma realimentação, o veículo vai sempre imprimir o mesmo torque para uma entrada X no acelerador. Ainda assim, ao subir uma ladeira, o torque resultante de X não será mais suficiente para manter a velocidade em 60 km/h, uma vez que haverá perturbações no sistema (a desaceleração gerada pela força gravitacional).
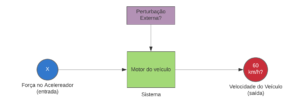
Figura 1. Representação de um sistema em malha aberta (diagrama desenvolvido na plataforma Lucidchart)
E essa é a principal desvantagem de um sistema em malha aberta. Como não há o rastreamento da saída, em caso de interferências externas, o resultado do sistema muito provavelmente não corresponderá às expectativas. Ainda assim, a malha aberta é muito utilizada por ser de fácil implementação e de baixo custo. Já a malha fechada faz uso de sensores para estabelecer a realimentação e tornar o sistema mais responsivo.
Voltando ao exemplo do veículo, vamos supor agora que há um sensor que irá verificar em tempo real a velocidade de saída do automóvel. Assim, por meio dessa informação, o sistema que controla a velocidade do carro saberá que, ao subir uma ladeira, o torque impresso pela entrada X não está mais sendo suficiente para manter a velocidade constante em 60 km/h. Então, ele deverá aumentá-lo até que a velocidade desejada seja obtida. Ou seja, independente de perturbações externas, a saída sempre rastreará à referência.
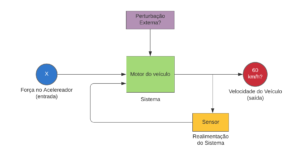
Figura 2. Representação de um sistema em malha fechada (diagrama desenvolvido na plataforma Lucidchart)
Portanto, vemos que, para diferentes aplicações e objetivos, as teorias básicas que envolvem o Controle de Sistemas podem ser aplicadas de modo a obter diferentes resultados. Em tese, são as especificações do projeto a ser desenvolvido que definirão a melhor forma de implementá-lo. Ainda assim, esses são apenas conceitos básicos, os quais podem ser explorados de forma mais aprofundada. Por exemplo, inserindo um controlador nesse sistema, como um circuito amplificador, é possível manipular outras variáveis, a exemplo do tempo de resposta. Mas isso já é assunto para outro post.
Postagem escrita pelo webmaster do Capítulo Matheus Cardoso.
4 comentários sobre “Conceitos Básicos de Controle: Malha Aberta X Malha Fechada”
eu queria saber mais sobre esse assunto aí
Olá, Cícero. Ficamos felizes que você tenha gostado do conteúdo a ponto de querer saber mais. Que tal entrar em contato conosco por meio de uma de nossas redes sociais para que possamos conversar melhor com você sobre isso?
Qual a rede social
No Instagram: @sbc.rasufcg
No e-mail: ras@ee.ufcg.edu.br